

Naukowcy z MIT opracowali czujnik dotykowy oparty na kamerze, który jest długi, zakrzywiony i przypomina ludzki palec. Ich urządzenie, które zapewnia precyzyjne wykrywanie dotyku na dużym obszarze, może umożliwić robotycznej dłoni wykonywanie wielu rodzajów chwytania. Zdjęcie: Dzięki uprzejmości badaczy
Napisane przez Adam Ziwi | Wiadomości MIT
Wyobraź sobie, że jedną ręką trzymasz coś ciężkiego, na przykład klucz do rur. Prawdopodobnie będziesz trzymać klucz całymi palcami, a nie tylko opuszkami palców. Receptory czuciowe w skórze, które biegną wzdłuż każdego palca, wysyłają do mózgu informacje o trzymanym narzędziu.
W dłoni robota czujniki dotykowe wykorzystujące kamery do pozyskiwania informacji o chwytanych przedmiotach są małe i płaskie, dlatego często znajdują się na wyciągnięcie ręki. Te roboty z kolei chwytają przedmioty wyłącznie opuszkami palców, zwykle wykonując ruch szczypiący. Ogranicza to zadania manipulacyjne, które mogą wykonywać.
Naukowcy z MIT opracowali czujnik dotykowy oparty na kamerze, który jest długi, zakrzywiony i przypomina ludzki palec. Ich urządzenie zapewnia precyzyjne wykrywanie dotyku na dużym obszarze. Czujnik o nazwie GelSight Svelte wykorzystuje dwa lustra do odbijania i załamywania światła, dzięki czemu jedna kamera, umieszczona u podstawy czujnika, może widzieć na całej długości palca.
Ponadto badacze zbudowali czujnik w kształcie palca z elastycznym kręgosłupem. Mierząc, jak kręgosłup zgina się, gdy palec dotyka przedmiotu, mogą oszacować siłę przyłożoną do czujnika.
Do produkcji wykorzystali czujniki GelSight Svelte Ręka robota Był w stanie chwycić ciężki przedmiot jak człowiek, wykorzystując cały obszar wykrywania swoich trzech palców. Ręka może również wykonywać te same operacje chwytania dysku, które są typowe dla konwencjonalnych chwytaków robotycznych.

Ta animacja przedstawia robotyczną dłoń zawierającą trzy czujniki GelSight Svelte w kształcie palca. Czujniki, które zapewniają precyzyjne wykrywanie dotyku na dużym obszarze, umożliwiają dłoni wykonywanie wielu chwytów, w tym chwytów ściskających, w których wykorzystuje się tylko opuszki palców, oraz chwytów wspomaganych, które wykorzystują cały obszar wykrywania trzech palców. Źródło: dzięki uprzejmości badaczy
„Ponieważ nasz nowy czujnik ma kształt ludzkiego palca, możemy go używać do różnych rodzajów chwytów do różnych zadań, zamiast używać do wszystkiego pięści. Wiele można zrobić za pomocą chwytaka ze szczękami równoległymi” – mówi Alan (Jialiang ) Zhao, student badań: „Nasz czujnik naprawdę otwiera nowe możliwości w zakresie różnych zadań przetwarzania, które możemy wykonać za pomocą robotów” – powiedział starszy z inżynierii mechanicznej i główny autor artykułu. papier Na GelSight Svelte.
Chow napisał artykuł wraz ze starszym autorem Edwardem Adelsonem, profesorem nauk o wzroku Johna i Dorothy Wilsonów na Wydziale Nauk o Mózgu i Kognitywistyce oraz członkiem Laboratorium Informatyki i Sztucznej Inteligencji (CSAIL). Wyniki badań zostaną zaprezentowane na konferencji IEEE poświęconej inteligentnym robotom i systemom.
Moje lustro, moje lustro
Ograniczenia kamer stosowanych w czujnikach dotykowych wynikają z ich rozmiaru, odległości ogniskowej soczewek i kąta widzenia. Dlatego te czujniki dotykowe są zwykle małe i płaskie i mieszczą się w palcach robota.
W przypadku dłuższego obszaru wykrywania, obszaru podobnego do ludzkiego palca, kamera będzie musiała znajdować się dalej od powierzchni wykrywania, aby widzieć cały obszar. Jest to szczególnie trudne, biorąc pod uwagę ograniczenia dotyczące rozmiaru i kształtu chwytaka robota.
Zhao i Adelson rozwiązali ten problem, używając dwóch luster, które odbijają i załamują światło w kierunku pojedynczej kamery umieszczonej u nasady palca.
GelSight Svelte zawiera płaskie, ustawione pod kątem lustro umieszczone naprzeciwko aparatu oraz długie, zakrzywione lustro umieszczone z tyłu czujnika. Lustra te redystrybuują promienie świetlne z aparatu w taki sposób, że aparat widzi na całej długości palca.
Aby poprawić kształt, kąt i krzywiznę zwierciadeł, naukowcy zaprojektowali oprogramowanie symulujące odbicie i załamanie światła.
„Dzięki temu oprogramowaniu możemy z łatwością sprawdzić, gdzie znajdują się zwierciadła i jak są zakrzywione, aby zorientować się, jak dobry będzie obraz po wyprodukowaniu czujnika” – wyjaśnia Zhao.
Lusterka, kamera i dwa zestawy diod LED do oświetlenia przymocowane są do plastikowego grzbietu i otoczone elastyczną powłoką wykonaną z żelu silikonowego. Kamera wyświetla tył skóry od wewnątrz; Na podstawie deformacji może zobaczyć, gdzie następuje kontakt i zmierzyć geometrię powierzchni styku obiektu.
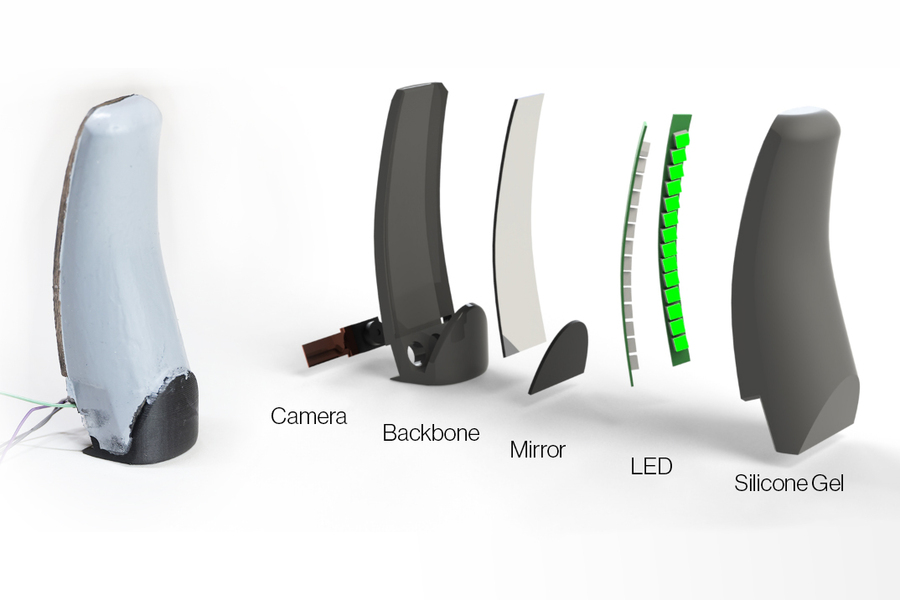
Podział elementów tworzących palcowy czujnik dotykowy. Zdjęcie: Dzięki uprzejmości badaczy
Dodatkowo czerwone i zielone diody LED dają poczucie głębokości wciśnięcia żelu podczas trzymania przedmiotu, ze względu na nasycenie kolorów w różnych miejscach czujnika.
Naukowcy mogą wykorzystać te informacje o nasyceniu kolorów do zrekonstruowania głębokiego obrazu 3D chwytanego obiektu.
Plastikowy grzbiet czujnika umożliwia określenie informacji proprioceptywnych, takich jak moment skręcający przyłożony do palca. Podczas chwytania przedmiotu kręgosłup zgina się i zgina. Naukowcy wykorzystują uczenie maszynowe do oszacowania siły przyłożonej do czujnika na podstawie deformacji kręgosłupa.
Zhao twierdzi jednak, że zintegrowanie tych elementów w skuteczny czujnik nie było łatwym zadaniem.
„Upewnienie się, że lustro ma odpowiednią krzywiznę, odpowiadającą tej, którą mamy w symulacji, jest bardzo trudne. Dodatkowo zdałem sobie sprawę, że istnieją pewne rodzaje superkleju, które zapobiegają utwardzaniu się krzemu. „Utworzenie wymagało wielu eksperymentów czujnik, który faktycznie działa” – dodaje. „.
Wszechstronna absorpcja
Po udoskonaleniu projektu naukowcy przetestowali urządzenie GelSight Svelte, naciskając przedmioty, takie jak śruba, w różnych miejscach czujnika, aby sprawdzić klarowność obrazu i sprawdzić, jak dobrze może ono określić kształt obiektu.
Wykorzystali także trzy czujniki do zbudowania dłoni GelSight Svelte, która może wykonywać wiele chwytów, w tym chwyt ściskający, chwyt boczny i chwyt mocny, który wykorzystuje pełny obszar wykrywania trzech palców. Większość robotycznych rąk, które mają kształt równoległych szczęk, może chwycić jedynie dysk.
Mocny chwyt trzema palcami umożliwia robotycznej dłoni pewniejsze trzymanie cięższego przedmiotu. Jednak trzymanie dysku jest nadal przydatne, gdy obiekt jest bardzo mały. Możliwość wykonywania obu rodzajów chwytania jedną ręką zapewni robotowi większą wszechstronność – mówi.
W przyszłości naukowcy planują ulepszyć urządzenie GelSight Svelte, tak aby czujnik był ruchomy i mógł zginać się w stawach jak ludzki palec.
„Opto-dotykowe czujniki palców pozwalają robotom używać niedrogich kamer do zbierania obrazów o wysokiej rozdzielczości kontaktu z powierzchnią, a obserwując odkształcenie sprężystej powierzchni, robot ocenia kształt kontaktu i przyłożone siły” – mówi Monroe Kennedy III, asystent profesor inżynierii mechanicznej na Uniwersytecie Stanforda, która brała udział w tych badaniach. „Poprawa zmysłu dotyku robota w celu zbliżenia się do ludzkich możliwości jest koniecznością i może być motywującym problemem w rozwoju robotów zdolnych do wykonywania złożonych i zręcznych zadań”.
Badania te są częściowo wspierane przez Instytut Badawczy Toyoty.

Wiadomości MIT


